La firme ZWO a été la première à introduire sur le marché une série de caméras refroidies avec matrice CMOS pour le ciel profond. Les firmes Atik et QHY offrent aussi des CMOS refroidies dans des modèles de caméras aussi dédiés au ciel profond. Les spécifications techniques sont semblables.
La firme ZWO propose aussi une nouvelle caméra avec une matrice CMOS monochrome Sony (IMX571) refroidie pour le ciel profond dont les performances sont meilleures que la matrice CMOS monochrome Panasonic.
Dans le but de comparer les performances de ces caméras à prix abordables, voici une analyse comparative de caméras à matrices CMOS et CCD.
La présente mise à jour de cette analyse comparative est établie à partir d’une meilleure compréhension du fonctionnement des matrices CMOS qui est plus complexe à saisir que les matrices CCD dû aux options de paramétrage du gain de la caméra. Elle n’est donc pas basée sur les spécifications des fabricants des matrices CMOS qui ont tendance à présenter les meilleures performances sans tenir compte des options d’ajustement du gain nécessaire pour aller chercher les détails de l’objet du ciel profond.
Toutes les caméras analysées ont une matrice au champ large. Il y aura comparaison entre les caméras avec matrice couleur et celle en monochrome. Considérant qu’il y a constamment des innovations technologiques dans ces types de caméras, je mettrai régulièrement à jour cette analyse comparative.
Toutes les caméras CCD monochromes sont munies de la populaire matrice Kodak KAF-8300. Considérant l’important volume de vente de ces modèles, ils sont offerts à un prix beaucoup plus bas que les autres matrices CCD monochromes au champ large. Il est donc intéressant de comparer leurs performances avec ceux à matrice CMOS dont le prix est très compétitif.
Voici donc un tableau permettant de comparer ces différents types de caméras :
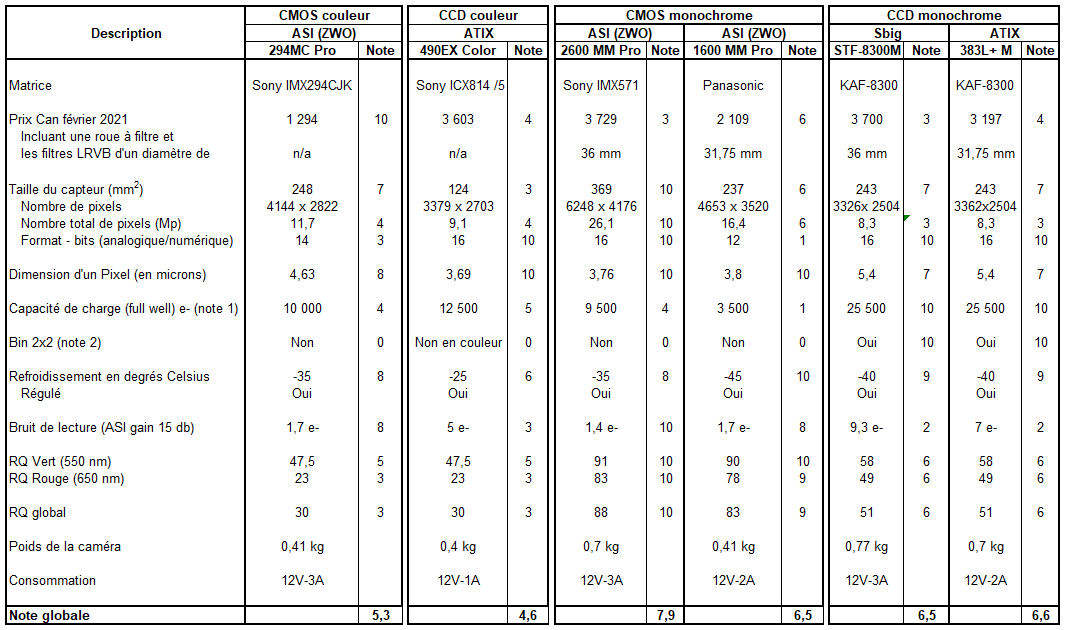
Cette évaluation est pour l’utilisation d’une seule caméra pour le grand champ de vision et le ciel profond. Donc, pour une utilisation dans toutes circonstances. Elle favorise donc les caméras avec des pixels plus petits avec une matrice de grande taille permettant un usage pour le grand champ de vision (focale courte). Elle permettra un meilleur échantillonnage. Pour le ciel profond (longue focale), on devra ajuster l’échantillonnage en utilisant le mode Bin 2×2. Comme l’image sera réduite dans un facteur de 4 dans ce mode, il faut favoriser aussi un plus grand nombre de pixels pour conserver une image de grande dimension pour le ciel profond. Par exemple, une caméra de 8 Mégas pixels (Mp) en bin 1×1 sera de 2 Mp en bin 2×2. Cela évitera ainsi d’acheter deux caméras, une pour le grand champ de vision (courte focale qui est la focale la plus utilisée pour les nébuleuses) et l’autre pour le ciel profond (longue focale qui est surtout utilisée pour les galaxies et les nébuleuses planétaires). Il faut considérer que ce n’est pas la majorité des amateurs qui ont les moyens d’investir dans deux caméras qui représentent un investissement de plus de 2 000 $ par caméra! Pour plus de détails et compréhension sur cet énoncé, voir la section Calculs astronomiques.
Voici la description de certains éléments du tableau :
- Prix en argent canadien (CAD) (février 2021) : pour les caméras monochromes, j’ai ajouté au prix de la caméra, le prix de la roue à filtre motorisée ainsi que les filtres LRVB. Pour les autres devises, utilisez le taux de change du jour pour avoir un estimé des coûts pour la monnaie de votre pays.
- Format – bits : C’est la conversion du signal analogique au format numérique. Pour en savoir plus sur les différents formats d’images, cliquer sur ce lien.
- Capacité de charge (full weel capacity) : C’est la capacité de charge des signaux lumineux captée par un pixel avant sa saturation (Blooming). Plus le chiffre est grand, meilleure est la plage dynamique (plus grand rapport signal/bruit). On peut comparer la capacité de charge d’un pixel à un seau d’eau, plus celui-ci est profond, plus on peut le remplir avant son débordement, permettant ainsi d’acquérir une plus grande quantité d’information sur l’objet à imager sans saturer les étoiles.
- Bin 2×2 : cliquer sur ce lien
- Le refroidissement de la caméra : À chaque refroidissement de 6o Celsius, le bruit thermique diminue de 50%. C’est donc un élément important à considérer lors du choix d’une caméra.
- Régulation du refroidissement : Cette caractéristique permet de fixer le refroidissement à une température fixe, par exemple -20o Celsius. Cela simplifie grandement la production des Noirs (Darks).
- Bruit de lecture : Les fabricants de caméras indiquent le bruit de lecture (Read Noice – RMS) en électron (e-). Plus le chiffre est grand, plus il y a du bruit qui s’ajoute à l’image.
- Rendement Quantique (RQ) : Cliquer sur ce lien
La note pour chaque caméra :
- Pour chaque élément, l’instrument le plus performant reçoit l’évaluation maximale de 10 ; les autres sont notés au prorata. Pour les formats 12 bits, 14 bits et 16 bits, le calcul est effectué sur la capacité de la matrice à distinguer des nuances différentes dans l’image : 12 bits = 4096 nuances, 14 bits = 16384 nuances et 16 bits = 65536 nuances.
- La Note globale : c’est la moyenne des notes individuelles. La note globale maximale est donc de 10.
Note 1 : Capacité de charge des matrices CMOS
Pour les matrices CMOS, la capacité de charge varie selon l’augmentation du gain (la sensibilité) de la caméra. Par exemple, pour la matrice Panasonic monochrome, à un gain de zéro dB, elle est de 20000e-. À un gain de 30 dB, elle diminue à environ 500e- seulement ! La capacité de charge du tableau est avec un gain moyen de 15 dB (ou 150 en unité de 0,1 dB) qui donne une capacité de charge d’environ 3500e- pour la matrice Panasonic monochrome. Ici, il faut considérer, dans la réalité sur le terrain, qu’il faut toujours augmenter le gain pour aller chercher des détails dans l’objet du ciel profond. En utilisant un gain moyen de 15 dB, cela permet de mieux évaluer les performances réelles des caméras CMOS et non utiliser les spécifications des fabricants qui mentionnent une capacité de charge de 20000e- à 0 dB pour la matrice Panasonic monochrome, ce qui est pratiquement impossible à utiliser dans la réalité.
Note 2 : Bin 2×2
Les matrices CMOS monochromes n’offrent pas le bin 2×2 matériel qui permet d’obtenir 4 fois plus de signal que le bin 1×1. Le Bin 2×2 des matrices CMOS permet d’obtenir plus d’images par secondes que le bin 1×1. Cette caractéristique n’est donc d’aucune utilitée pour l’imagerie du ciel profond. Elle peut être intéressante pour l’imagerie des planètes en offrant plus d’images par seconde.
Conclusion de cette analyse comparative
La matrice CMOS couleur a une note globale supérieure au capteur CCD couleur (5,3 comparé à 4,6). Si votre choix est une caméra couleur, alors c’est la caméra ASI 294MC Pro qui offre les meilleures performances dans son ensemble. Son prix est aussi imbattable (1294 $ versus 3603 $ pour la caméra CCD).
Pour les caméras monochromes, c’est la nouvelle caméra ASI 2600 MM Pro avec matrice CMOS qui a la meilleure performance globale (7,9 comparées aux trois autres qui ont des notes entre 6,5 et 6,6). Nous assistons donc actuellement à une victoire des matrices CMOS sur les CCD pour les caméras à prix abordables. C’est aussi la première caméra CMOS au format 16 bits qui peut reproduire 65536 nuances comme les caméras CCD, ce qui représente un exploit technologique.
Il faut noter que pour les matrices CMOS monochromes, on ne peut pas utiliser le mode Bin 2×2. Je rappelle que le Bin 2×2 permet d’acquérir 4 fois plus de signal que le Bin 1×1 pour un même temps d’exposition. En plus, ce mode permet d’ajuster l’échantillonnage de la caméra selon l’objet à imager (tel que mentionner dans l’énoncé ci-dessus). Les matrices CMOS monochromes sont donc moins polyvalentes que les matrices CCD monochromes et sont ainsi plus dédiées aux focales courtes (grand champ de vision). Pour moi, cela reste un avantage important, car j’utilise toujours le mode bin 2×2 pour toutes mes images acquises avec ma caméra Atik 383L monochrome, ce qui me permet d’obtenir 4 fois plus de signal.
Richard Beauregard
Le Ciel Astro – CCD
Révisé le 2022/08/14
Références
Selon les spécifications des fabricants. Pour les matrices CMOS, j’ai ajusté les spécifications du fabricant ZWO en utilisant un gain moyen de 15 dB. Pour obtenir l’information, j’ai utilisé les graphiques de celui-ci qui sont présentés sur leur site Web.
Pour le RQ, les valeurs retenues sont pour le rouge à 650 nanomètres, le vert à 550 nm et le bleu à 450 nm permettant ainsi une comparaison entre les caméras. Pour les caméras couleur, le RQ est ajusté de la façon suivante : RQ * 25% pour le rouge et bleu et RQ * 50% pour le vert.